发布时间:2026-06-30
发布时间:2026-06-30
 点击次数:11
点击次数:11
半导体晶圆制造光刻、蚀刻、薄膜沉积等核心工艺区统一执行ISO 14644-1 Class5 百级洁净标准,空气中≥0.5μm 微粒严格管控;晶圆、光罩、精密腔体对静电击穿零容忍;晶圆盒、真空设备吊装需无碰撞、无晃动微米级对位。因而晶圆厂在选择立柱式悬臂吊设备时必须同时满足ISO5 百级无尘、全结构防静电、微米级精准定位三大硬性指标,缺一不可。

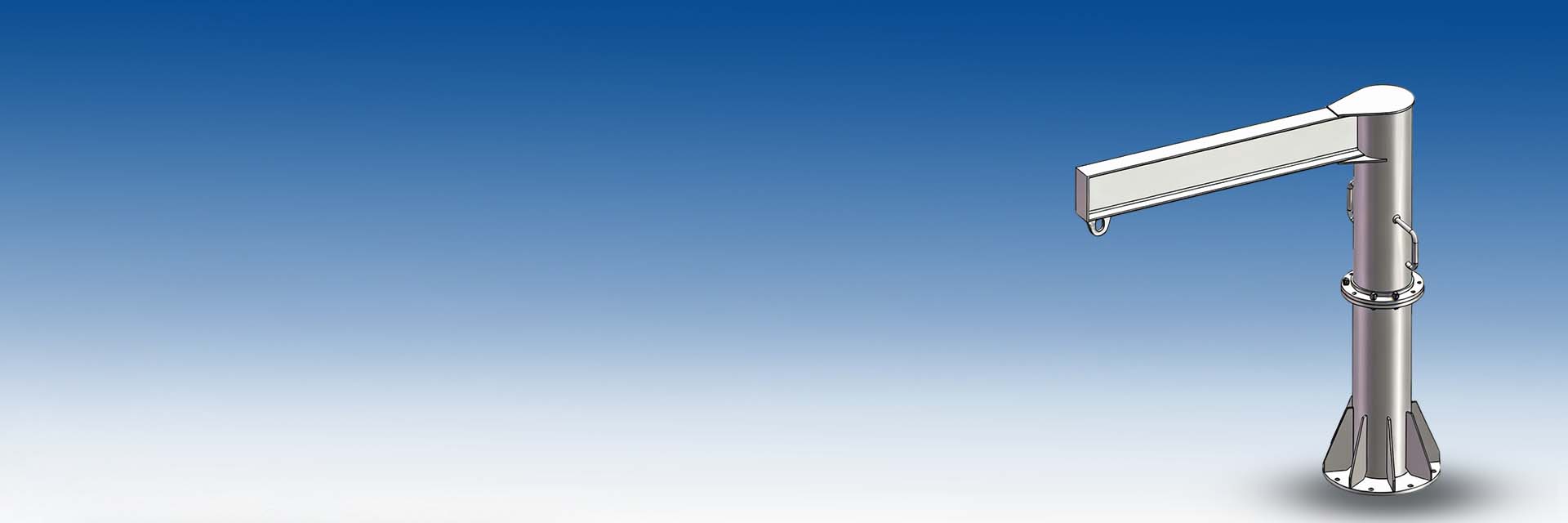
晶圆厂立柱式悬臂吊
1.洁净悬臂起重机全不锈钢结构 + 无缝焊接 + 无油润滑系统;
2.表面阳极氧化处理,电阻值控制在10⁶–10⁹Ω;
3.伺服电机驱动 + 激光编码器反馈,精度±1mm;
4.微振控制 ≤0.5μm,抗摇摆设计。
晶圆对 ESD 的容忍度是伏特级,悬臂吊的链条、吊钩、手柄、遥控壳、轮面全是潜在放电源。
关键参数三条:
1.表面电阻 10⁴–10⁹ Ω(多数 Fab 卡 10⁶–10⁹ Ω),用兆欧表验收,不是看厂家彩页;
2. 整机独立接地,接地电阻 < 4 Ω,接地线不能跟照明/动力共用排。
3.非金属件(滚轮、护套、遥控外壳)必须用防静电级聚氨酯/工程塑料,不能用普通黑色橡胶替代。
常见踩坑:有些厂家只做了金属结构接地,但吊钩护套、遥控壳没走防静电料,结果粒子没超、ESD 事件却周期性出现——查了半天才发现是操作员握遥控时 Human Body Model 放电通过吊具耦合到 wafer 盒。
| 技术模块 | 实现方式 | 性能指标 |
| 驱动系统 | 伺服电机+变频控制器 | 定位响应时间<50ms |
| 反馈系统 | 激光编码器+光栅尺 | 分辨率0.1um,重复精度+0.5um |
| 运动控制 | 三轴闭环PID控制 | 运行微振≤0.5um(@10Hz) |
| 防摇摆 | 基于模型预测的抗摆算法 | 吊具摆动幅度<2mm(空载) |
在半导体制造的“纳米级战场”上,悬臂吊不是搬运工具,而是洁净环境的守门人。选型时,精度决定良率,防静电决定生死,洁净度决定成败。选择专业厂商,严守标准,方能保障每一片晶圆的终极价值。